La nouvelle plateforme intelligente de véhicule GM, ou plateforme VIP, actuellement utilisée sur les modèles Corvette, CT4 et CT5 2020-2022, et Tahoe, Suburban, Yukon, Escalade et Envision 2021-2022, procure une capacité accrue et la possibilité de mieux gérer la complexité technologique.
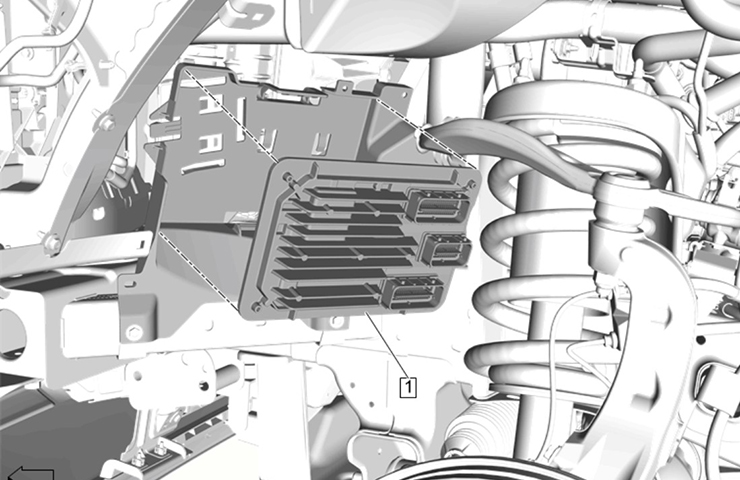
Grâce à une augmentation quintuplée en capacité de systèmes et en rapidité de réponse par rapport au système actuel Global A, l’architecture électrique VIP de prochaine génération offre la capacité de gérer plus de 100 modules informatiques. Elle est en mesure de prendre en charge les systèmes de sécurité active, les mises à jour logicielle de véhicule par liaison radio (OTA), les réseaux 5G, les protections de cybersécurité améliorées et les technologies de véhicule électrique (Fig. 1).
 Fig. 1
Fig. 1
L’architecture électrique VIP comprend des bus CAN à deux fils et des bus Ethernet à deux fils qui assurent un transfert de donnée haute vitesse et permettent à plusieurs bus LIN à fil simple d’échanger des informations entre les modules de commande maîtres et d’autres dispositifs intelligents. Les réseaux GMLAN à basse vitesse ne sont plus utilisés sur les véhicules VIP.
Protocole CAN
Le protocole de communication de l’architecture VIP est basé sur le protocole CAN (Controller Area Network) largement utilisé. Les bus CAN sont utilisés lorsque les données doivent être échangées à haute vitesse, particulièrement par un dispositif de commande qui utilise de l’information pour le réglage d’un système du véhicule, comme les commande de groupe motopropulseur ou de confort/commodité. Chaque réseau de données CAN est constitué de deux fils torsadés, nommé CAN (+) et CAN (-), avec une résistance terminale de 120 ohms (Ω) à chaque extrémité du bus entre les circuits CAN (+) et CAN (-).
La technologie de communication de données Ethernet utilise une seule paire de fils de cuivre torsadés à des vitesses de 100 Mbit/s et 1000 Mbit/s. Le système Ethernet utilise la communication point à point raccordée par un commutateur Ethernet [Module <–> Switch <–> Module]. Le bus Ethernet n’utilise pas de résistance terminale.
Le module d’interface de données série K56 et l’autoradio A11 sont dotés d’un commutateur Ethernet raccordé aux autres modules Ethernet. Ces modules communiquent avec les autres dispositifs et systèmes du véhicule par l’entremise des bus CAN et LIN. Les codes d’anomalie sont lus sur le CAN pour diagnostiquer les défaillances Ethernet, LIN et systèmes.
Toute défaillance d’un faisceau de câbles Ethernet doit être réparée uniquement avec la trousse appropriée pour la réalisation du débrochage/rebrochage. Si les trousses de réparation de faisceau de câbles ne sont pas disponibles, il faut remplacer le faisceau de câbles complet. Aucun sertissage ou épissage ne doit être réalisé sur le faisceau de câbles Ethernet.
Interface de données série
Pour signaler toute perte de communication et établir les codes d’anomalie, le module d’interface de données série K56 doit connaître et apprendre les modules de commande du véhicule et leurs bus associés. Si le module d’interface de données série est remplacé ou qu’un autre module est ajouté au bus, comme un accessoire posé par le concessionnaire, il est essentiel de réaliser un processus d’apprentissage au moyen du processus d’apprentissage du module d’interface de données série dans le système SPS.
Le contenu précédemment programmé n’est pas supprimé ou écrasé par le processus d’apprentissage. Si le processus d’apprentissage n’est pas réalisé sur un nouveau module d’interface de données série, le code d’anomalie U1977 (auto-apprentissage d’identification de l’ECU non réalisé) s’établit jusqu’à ce que la procédure d’apprentissage soit réalisée. Si le processus d’apprentissage n’est pas valide en raison d’une défaillance interne ou d’un remplacement de module d’interface de données série, le code d’anomalie U3000 42 (Module de commande – Défaillance mémoire générale) ou U3002 56 (Numéro d’identification du véhicule – Configuration non valide/incompatible) s’établit. Il y a ensuite perte de communication entre le module d’interface de données série et tous les modules de commande, puis des codes d’anomalie s’établissent relativement à des modules de commande absents du véhicule.
Le module d’interface de données série fonctionne également comme une passerelle qui isole les réseaux sécurisés du véhicule des réseaux non sécurisés. L’isolement des réseaux principaux permet le fonctionnement parallèle des systèmes d’aide au conducteur avancée et des caractéristiques de sécurité active, comme l’évitement de collision amélioré. Si un logiciel malveillant entre dans le véhicule par l’entremise du système d’infodivertissement, d’OnStar ou du connecteur de diagnostic, ce logiciel pourrait avoir une incidence sur les autres systèmes du véhicule.
Mode d’alimentation
Dans l’architecture VIP, le module confort/commodités K9 est le dispositif maître du mode d’alimentation (PMM) et le module d’interface de données série K56 est le PMM de secours. Il y a cinq modes d’alimentation : contact coupé, accessoires, mode de marche/entretien (moteur arrêté), propulsion (moteur en marche) et démarrage. Tout comme le PMM, le module BCM utilise un certain nombre d’états et les données du véhicule pour déterminer quel mode d’alimentation est requis. Il envoie ces informations aux autres modules par l’entremise des données série.
MDI 2 requis
L’outil MDI 2 EL-52100 est requis la programmation, configuration et paramétrage de module de commande sur les véhicules équipés de l’architecture VIP. L’outil MDI 1 n’est pas en mesure de réaliser les procédures de programmation et de paramétrage. L’utilisation d’un MDI 1 sur ces véhicules peut entraîner des données erronées ou l’échec de la programmation qui pourrait entraîner le remplacement inutile du module.
En cas d’installation d’un analyseur-contrôleur, il tente de communiquer avec chaque module de commande qui peut être disponible sur le véhicule, selon l’équipement en option. Si une option n’est pas présente sur le véhicule, l’outil affiche « No Communication » (aucune communication) pour ce module de commande. Pour éviter les mauvais diagnostics d’un message « No Communication » (aucune communication), Se reporter aux références de liaison de données qui indiquent les modules de commande et les bus avec lesquels les modules communiquent dans les renseignements techniques (SI) appropriés et dans les codes EFC de fabrication du véhicule afin de déterminer les modules de commande en option.
Programmation d’un module
En cas de programmation SPS (système de programmation d’entretien) d’un module (Fig. 2), suivre toutes les directives à l’écran du système SPS.
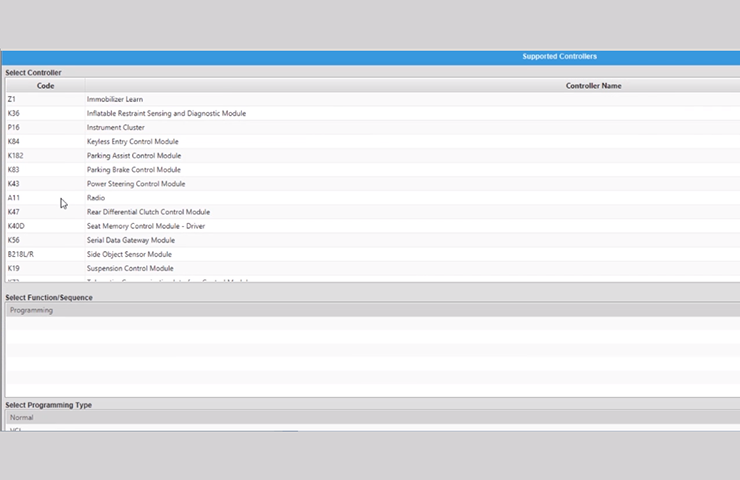 Fig. 2
Fig. 2
Ces conseils sont également utiles pour l’exécution appropriée d’une programmation :
Confirmer le NIV – Techline Connect (TLC) n’exécute pas automatiquement la lecture du numéro d’identification du véhicule (NIV) dans le mode d’alimentation Contact coupé. Les techniciens doivent confirmer que le NIV est approprié avant la programmation en vérifiant que le NIV indiqué dans Techline Connect correspond à la plaque du NIV du véhicule (Fig. 3). S’assurer de ne pas sélectionner un NIV déjà présent dans la mémoire de l’application Techline Connect, qui proviendrait par exemple du véhicule précédent.
Pour utiliser la lecture NIV avec Techline Connect, le mode d’alimentation (allumage) du véhicule doit être Contact mis avant de procéder à la lecture du NIV à partir du module de commande du moteur (ECM), qui est le module maître du NIV du véhicule. La programmation ou la reprogrammation des modules avec un NIV incorrect et l’utilisation de logiciels et de fichiers d’étalonnage d’un NIV incorrect peut entraîner des problèmes d’entretien futur, de même que des problèmes potentiels de rendement du véhicule qui pourraient nécessiter une reprogrammation du véhicule.
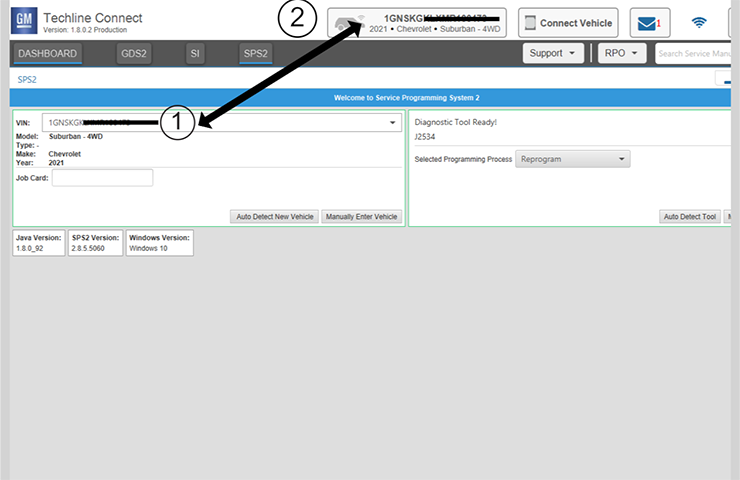 Fig. 3
Fig. 3
Tension de la batterie – Une tension stable de la batterie est essentielle pendant la programmation. Toute fluctuation, les pics, la surtension ou la perte de tension interrompent la programmation. Installer un outil de soutien de programmation autorisé par GM pour maintenir la tension du système. Ne pas utiliser un chargeur de batterie.
Mode d’alimentation Contact coupé – Le mode d’alimentation (allumage) doit être Contact coupé pour démarrer la programmation du module. Toute charge sur la batterie du véhicule, comme l’éclairage intérieur, les feux extérieurs et les feux de circulation de jour, de même que le fonctionnement du système CVC, peuvent avoir une incidence sur le processus de téléchargement et causer des erreurs.
Ne pas changer le mode d’alimentation – Ne pas changer le mode d’alimentation du véhicule (position du commutateur d’allumage) pendant la procédure de programmation, à moins d’indication contraire. La programmation entraîne le ou les modules de commande appropriés à changer le mode d’alimentation au besoin pendant la procédure, peu importe le mode d’alimentation du véhicule.
Maintenir le véhicule entièrement en veille – S’assurer que le véhicule ne s’éveille pas pendant la programmation en maintenant toutes les portes fermées (véhicule entièrement en veille). Pour accéder au véhicule, enclencher le loquet de la porte du conducteur en position fermée pour que la porte puisse demeurer ouverte. Si une porte fermée est ouverte pendant la programmation, les bus s’éveillent et causent l’établissement de codes d’erreur.
Effacer tous les codes d’anomalie – Après la programmation, effacer tous les codes d’anomalie et laisser le véhicule tomber en mode de veille. Les codes d’anomalie U1962 (incapacité d’authentifier le message de données série) et U1983 (défaillance matérielle interne du module d’interface de données série) peuvent s’établir et le témoin d’anomalie (MIL) peut s’allumer si les codes d’anomalie ne sont pas effacés et que le véhicule ne tombe pas en veille après la programmation ou la configuration de l’authentification de données série (SDAC).
En cas d’échec de la SDAC, le code d’anomalie U1962 s’établit en tant que code actuel. Il demeure établi jusqu’à la réalisation de la programmation qui exécute la SDAC, ou jusqu’à la réalisation de la procédure SDAC autonome au moyen du système SPS. Si le code d’anomalie U1962 est mémorisé uniquement en tant que code historique, et qu’il n’est pas récupéré en tant que code actuel, ne pas réaliser la procédure SDAC.
Attendre 5 minutes – Une fois la programmation terminée, laisser le véhicule à l’arrêt pendant cinq minutes avec le contact coupé, le prolongement d’alimentation des accessoires arrêté et le porte-clés retiré du véhicule. Après cinq minutes, le système peut être mis en marche pour la vérification des réparations.
– Merci à Bret Raupp et Peter Shear