Le système de caméra de vision périphérique (EFC UV2) offert sur différents modèles GM affiche une vue du dessus de la zone autour du véhicule, de même que des vues de caméra avant ou arrière, sur l’écran système d’info divertissement (Fig. 16). La caméra avant se trouve dans la calandre ou à proximité de l’emblème avant du véhicule, les caméras latérales se trouvent à la base des rétroviseurs extérieurs et la caméra arrière est au-dessus de la plaque d’immatriculation.
 Fig. 16
Fig. 16
Le système de vision périphérique comprend les composants ci-dessous :
- B87 Caméra de vue arrière
- B174G Caméra de vue avant – Calandre
- K157 Module de commande de traitement vidéo
- A11 Autoradio OU K74 Module d’interface homme-machine
- B225L Caméra de vue latérale – Gauche
- B225R Caméra de vue latérale – Droite
- X20 Réceptacle pour carte mémoire
Fonctionnement du système
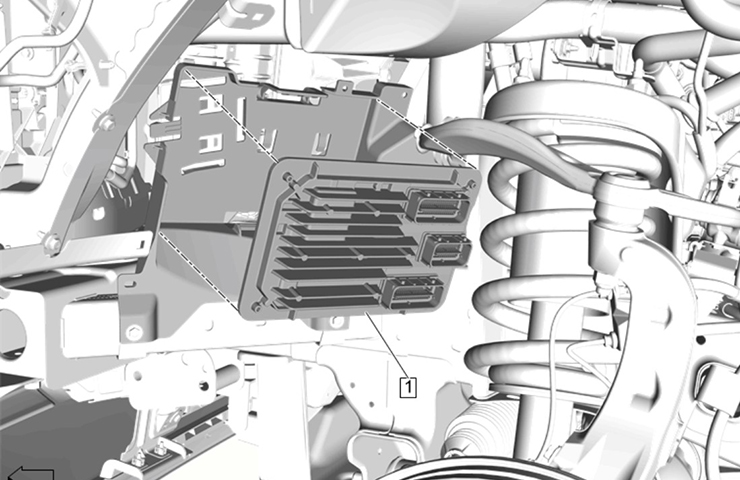
Lorsque le véhicule se déplace à des vitesses inférieures à 10 km (6 mi/h), le module de commande de traitement vidéo met sous tension les caméras et envoie un signal vidéo à l’autoradio ou au module d’interface homme-machine (Fig. 17).
 Fig. 17
Fig. 17
Le module de commande de traitement vidéo fournit une tension et une masse constante pour alimenter les caméras. Les circuits de signal vidéo + et de signal vidéo – transportent l’image vidéo des caméras jusqu’au module de commande de traitement vidéo pour le traitement. Ce dernier envoie ensuite l’image traitée au système d’infodivertissement sur les circuits de signal vidéo + et de signal vidéo –. Tous les circuits du signal vidéo sont torsadés et gainés pour éviter toute interférence qui pourraient mener à la perte de la résolution du signal vidéo, donc à une dégradation de l’image vidéo. Ces circuits ne doivent pas être épissés ou retirés de leur gaine, car ceci peut causer une dégradation de l’image.
Le module de commande de traitement vidéo reçoit l’information du réseau CAN envoyée par le module de détection d’objets de l’aide au stationnement arrière, et reçoit également l’angle de braquage envoyé par le module confort/commodité lorsque le véhicule est en marche arrière.
Diagnostics
Pendant le diagnostic du système de vision périphérique, plusieurs codes d’anomalie peuvent être établis relativement à des problèmes de câblage de signal vidéo entre les caméras et le module de commande de traitement vidéo, ou entre le module de commande de traitement vidéo et l’autoradio. Se reporter au tableau ci-dessous pour certains problèmes fréquents de signal qui pourraient se manifester sous forme d’écran bleu ou d’image déformée à l’écran d’infodivertissement (Fig. 18).
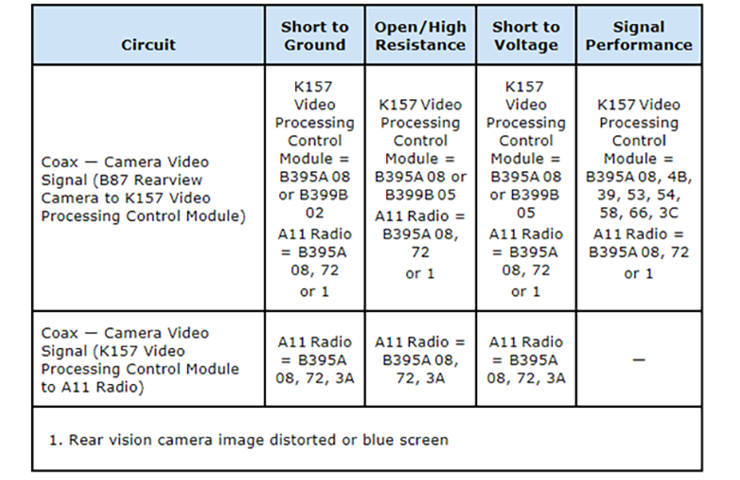 Fig. 18
Fig. 18
Une coupure de la gaine du circuit du signal vidéo peut également causer la distorsion de l’écran.
Si le module de commande de traitement vidéo n’est pas en mesure d’étalonner toutes les caméras, l’image de la caméra pourrait être affichée sans ligne de trajectoire.
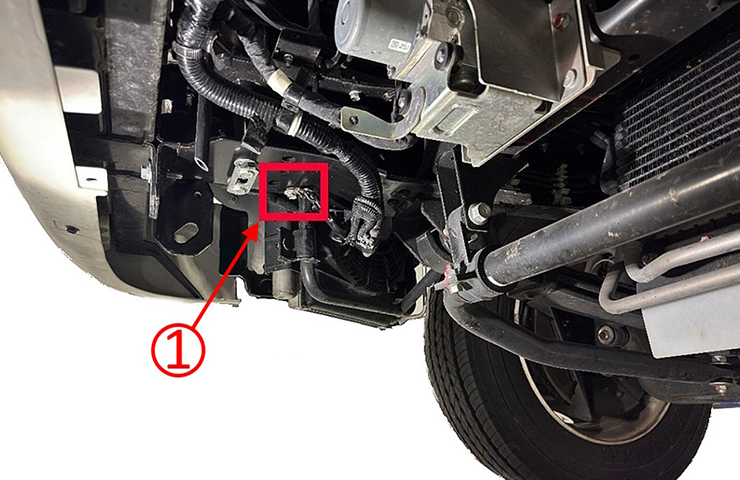
De plus, une coupure dans le circuit de commande de feu de recul, des feux de recul défectueux ou des feux de recul inappropriés ou du marché secondaire peuvent causer des irrégularités sur le circuit, comme une tension non souhaitée sur un circuit lorsque le véhicule n’est plus en marche arrière. Si l’affichage de l’image de la caméra demeure présent une fois que le véhicule n’est plus en marche arrière, il pourrait s’agir de problèmes de circuit de commande de feu de recul.
Usure de contact des bornes
Certains problèmes intermittents peuvent être causés par la corrosion d’usure de contact des bornes de fils, c’est-à-dire une accumulation de débris d’usure oxydés isolants. Cette accumulation peut se former lorsqu’il y a un petit mouvement entre les contacts électriques. La corrosion d’usure de contact peut être difficile à voir. Elle ressemble à de petites taches sombres sur la surface de contact des bornes.
Si le problème est intermittent et qu’il ne peut pas être reproduit, débrancher les connecteurs et ajouter une graisse diélectrique (Nyogel 760G ou l’équivalent, conforme à la norme GM 9986087) sur les deux côtés des bornes. La graisse diélectrique devrait corriger tout problème de résistance élevée causée par la corrosion d’usure de contact.
Essai de câble coaxial
La trousse d’adaptateur de câble COAX FAKRA EL-52552 (Fig. 19) peut faciliter le diagnostic de différents câbles coaxiaux, y compris les câbles de réseau Wi-Fi, de caméras et d’antenne.
 Fig. 19
Fig. 19
La trousse EL-52552 couvre toutes les configurations de câbles connues dotées de connecteurs FAKRA. L’utilisation des adaptateurs de la trousse permet le raccordement à une extrémité du connecteur de câble coaxial (avec résistances), il est donc maintenant possible de vérifier uniquement l’autre extrémité du connecteur, contrairement à la méthode actuelle de vérification bout-à-bout réalisée par le branchement de trois ou quatre fils de test DVOM. Les prises bananes permettent l’utilisation de la trousse d’adaptateur de borne.
La trousse peut être utilisée pour vérifier la tension des composants, de même que pour vérifier les câbles coaxiaux.
CONSEIL : Avant de tester le câble coaxial, vérifier si l’extérieur du câble est pincé, coupé ou endommagé, ou rechercher des branchements desserrés au niveau des composants, car tous ces problèmes peuvent causer une mauvaise réception.
Étalonnage du module de commande de traitement vidéo
Si le module de commande de traitement vidéo n’est pas étalonné adéquatement, une icône de sablier est affichée à l’écran d’infodivertissement. Une fois l’étalonnage terminé, le sablier disparaît automatiquement.
L’étalonnage est réalisé automatiquement par le module de commande de traitement vidéo. Il est nécessaire pour que le module de commande de traitement vidéo puisse acquérir les nouvelles caméras et leur position.
Chaque fois qu’une caméra est remplacée dans le système de caméra de vision périphérique, l’image de la caméra doit être étalonnée dans le système. Le module de commande de traitement vidéo exécute l’étalonnage pendant sa mise sous tension et pendant la séquence d’amorçage à chaque cycle d’allumage afin de maximiser la qualité de l’image de la vision périphérique.
En cas de remplacement du module de commande de traitement vidéo, le nouveau module contient les valeurs par défaut pour l’acquisition de caméras. Toutefois, le module de commande de traitement vidéo amorce l’étalonnage automatiquement pour s’adapter au véhicule.
Pour permettre au module de commande de traitement vidéo de procéder à étalonnage, conduire le véhicule. Pour réduire le temps nécessaire à l’étalonnage, le véhicule devrait être conduit sur une surface relativement plane et droite pendant au moins 0,5 km (0,3 mille) à une vitesse de 10 à 30 km/h (6 à 19 mi/h).
– Merci à Russ Gilbert